Difference between revisions of "Conjunto de péndulo de precisión: Calibración"
| Line 130: | Line 130: | ||
Durante el arranque, el microcontrolador ejecuta la función de prueba del láser y de la puerta fotoeléctrica para garantizar que ambos componentes funcionen correctamente. Si la prueba falla, el microcontrolador devuelve el código de error "ERR1". Este error puede estar asociado con uno o más de los siguientes problemas posibles: | Durante el arranque, el microcontrolador ejecuta la función de prueba del láser y de la puerta fotoeléctrica para garantizar que ambos componentes funcionen correctamente. Si la prueba falla, el microcontrolador devuelve el código de error "ERR1". Este error puede estar asociado con uno o más de los siguientes problemas posibles: | ||
*Conexiones eléctricas incorrectas: Verifique la sección [[#Conexiones | Conexiones]] para asegurarse de que tanto el láser como la puerta fotoeléctrica estén correctamente conectados al microcontrolador. | *Conexiones eléctricas incorrectas: Verifique la sección [[#Conexiones | Conexiones]] para asegurarse de que tanto el láser como la puerta fotoeléctrica estén correctamente conectados al microcontrolador. | ||
| − | *Desalineación del láser y de la puerta fotoeléctrica: Compruebe si la luz láser apunta correctamente al orificio de la estructura de la puerta fotoeléctrica y ajuste como se describe en la sección [[# | + | *Desalineación del láser y de la puerta fotoeléctrica: Compruebe si la luz láser apunta correctamente al orificio de la estructura de la puerta fotoeléctrica y ajuste como se describe en la sección [[#Fotopuerta y alineación láser | Fotopuerta y alineación láser]] si es necesario. |
*La fotopuerta está siempre cerrada (conductora): si la luz ambiental es demasiado intensa o si alguna fuente de luz distinta al láser atraviesa el orificio de la estructura de la fotopuerta con suficiente intensidad, puede suceder que la fotopuerta siempre está conduciendo, lo que hace imposible al microcontrolador distinguir entre los estados de encendido y apagado del láser. En este caso, la solución es reducir la luz ambiental o cambiar la orientación del experimento para que la fotopuerta reciba menos luz. | *La fotopuerta está siempre cerrada (conductora): si la luz ambiental es demasiado intensa o si alguna fuente de luz distinta al láser atraviesa el orificio de la estructura de la fotopuerta con suficiente intensidad, puede suceder que la fotopuerta siempre está conduciendo, lo que hace imposible al microcontrolador distinguir entre los estados de encendido y apagado del láser. En este caso, la solución es reducir la luz ambiental o cambiar la orientación del experimento para que la fotopuerta reciba menos luz. | ||
[[File:Laser focus.png |thumb| Procedimiento para enfocar el rayo láser.|right|border|164px]] | [[File:Laser focus.png |thumb| Procedimiento para enfocar el rayo láser.|right|border|164px]] | ||
| Line 163: | Line 163: | ||
* '''pendulum length''': El procedimiento para medir la cadena se describe en [[#Medida de cuerdas | Medida de cuerdas]]. Luego, el radio de la esfera/bola (en la dirección vertical, es decir, a lo largo de la dirección de la cuerda) debe agregarse a la longitud de la cuerda, lo que da como resultado la longitud del péndulo. La unidad de longitud para esta cantidad es el metro (a diferencia de las otras que es el centímetro). Una vez que se ha medido la longitud del péndulo, almacene el valor en el flash del microcontrolador usando el comando "set pendulum length". | * '''pendulum length''': El procedimiento para medir la cadena se describe en [[#Medida de cuerdas | Medida de cuerdas]]. Luego, el radio de la esfera/bola (en la dirección vertical, es decir, a lo largo de la dirección de la cuerda) debe agregarse a la longitud de la cuerda, lo que da como resultado la longitud del péndulo. La unidad de longitud para esta cantidad es el metro (a diferencia de las otras que es el centímetro). Una vez que se ha medido la longitud del péndulo, almacene el valor en el flash del microcontrolador usando el comando "set pendulum length". | ||
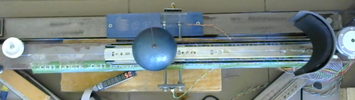
| − | * '''origin position''': | + | * '''origin position''': Esta es la ubicación de la pala cuando el microinterruptor la detiene (consulte la figura siguiente para ver una ilustración). Para medir esta posición: |
| + | : * envía la pala al origen usando el siguiente comando: | ||
| + | go to origin 2 2 | ||
| + | |||
| + | : * una vez parada la pala, registre la posición absoluta de la pala leyendo el valor en la escala métrica fijada en el lanzador con la ayuda del indicador adjunto a la pala. | ||
| + | |||
| + | : * almacenar el valor medido (xx.xx) en la memoria flash del microcontrolador usando el comando "set origin position". | ||
| + | :[[File:origin_position.png|x100px|Posición de origen]] | ||
Revision as of 13:59, 5 April 2021
Contents
Calibración
Medida de cuerdas


La precisión del péndulo depende en gran medida de su rigurosa medición de longitud (~ 2700 m) con menos de 0,5 mm. De hecho, este es el factor crucial para lograr la precisión deseada del 0,02% y para eso proponer una cinta métrica bien calibrada a elegir. Si se adopta este método, se debe tener especial cuidado para evitar el paralaje. Los métodos alternativos como la medición ultrasónica con puntería láser son los mejores, utilizando un plano de piedra metálico o de mármol ajustado tangencial al peso (lo que le permite rodar pero tocando el plano). Con este método se realizarán unas cuantas tomas rodeando la bola y su valor medio se considerará la longitud de referencia del péndulo.
Recalibración de la longitud a perseguir cada mes para garantizar una precisión razonable.
En la primera figura se muestra cómo rectificar el desplazamiento inicial de la cinta métrica eliminando con cuidado el error sistemático del contacto con la esfera. Luego, la cinta pasa a través del orificio de la meseta donde se asienta el fulcro hasta que alcanza la superficie de la bola. Luego, se deben tomar algunas medidas para tener un promedio adecuado.
Plano de oscilación

El plano de oscilación tiene que ser definido críticamente para evitar efectos de segundo orden en la determinación del período debido a un momento elíptico en lugar de uno plano. Por supuesto, la fuerza de Coriolis no se puede evitar, pero solo para carreras muy largas (> 15 min) influirá significativamente en el movimiento.
Tener el avión bien establecido para evitar cualquier fuerza tangencial durante el lanzamiento de la sacudida. Para ello, se debe verificar una alineación perfecta de la trayectoria de la pala dentro del plano de oscilación.
Paralelismo del piso de los triángulos superior e inferior
La primera calibración es proporcionar un paralelismo aproximado entre los triángulos estructurales superior e inferior. Para ello, la estructura debe ser colocada en un piso regular y tener un apriete final de los tornillos que conducen a una armadura rígida.
Luego, el triángulo superior debe nivelarse utilizando el propio bob, dejándolo en la posición central del triángulo inferior y a ~ 10-12 cm de la parte posterior; en la dirección ortogonal del plano oscilante, se debe usar un nivel de burbuja en primera aproximación y luego se debe refinar un ajuste fino de la sacudida de acuerdo con la posición de la puerta fotoeléctrica. Se garantiza que la bobina se desplaza exactamente por el medio de la puerta fotoeléctrica.
Movimiento de Bob dado por la excitación del fulcro
Después de ubicar el péndulo en su lugar final y tener la sacudida en reposo, comience un balanceo suave (movimiento lento) excitándolo en el fulcro en la parte superior para definir el plano de oscilación.
- En primer lugar, asegúrese de que esta oscilación sea aproximadamente paralela al lanzador / pared girando el soporte del fulcro.
- Con la ayuda de una linterna (i) en el frente de la pala / bob y (ii) colocando un papel blanco con una línea negra vertical centrada en la parte superior de la pala en el origen (iii) ajuste los tornillos de inclinación horizontal del lanzador para tener la plataforma del lanzador perfectamente alineada con el plano de oscilación. Esto se puede ver fácilmente si el centro de sombra de la bobina no se mueve horizontalmente y la sombra del cable no se desvía de la línea negra del papel.
Consola de interfaz a microcontrolador
El microcontrolador proporciona un menú que permite al usuario establecer los parámetros del experimento y ejecutar funciones predefinidas para permitir la configuración y las pruebas. La interfaz entre usuario y microcontrolador se realiza a través de la conexión serie RS-232 con los siguientes parámetros:
• Velocidad en baudios: 115200 bps • Paridad: No • Bits de datos: 8 • Bits de parada: 1
Tenga en cuenta si tiene otra aplicación utilizando el dispositivo correspondiente. En realidad, puede hacer que JAVA deamon se ejecute, evitando el acceso al puerto serie. En tal caso, debe detenerse (ejecutando el comando con la bandera STOP) antes de ejecutar la aplicación minicom como en el siguiente ejemplo (adáptese a su ruta local):
elab@WP-RAI:~ $ /home/wpa/rec-deployment/wpunicvrai/wpunicvraiDaemon.sh Stop
Como ejemplo, la interfaz de la consola "minicom" se puede utilizar para comunicarse con el microcontrolador. En RaspberryPi, esta interfaz se puede llamar desde un shell usando el siguiente comando:
minicom -D /dev/ttyS0
o
minicom -D /dev/ttyAMA0
“/dev/ttyS0” or "/dev/ttyAMA0" es la ubicación del dispositivo (microcontrolador). El programa minicom creará una conexión serial con parámetros por defecto que, en principio, son los mismos que los mencionados anteriormente. Si no es así, consulte la página de ayuda del programa minicom (escriba "man minicom") para ver cómo configurar esos parámetros. Después de iniciar el programa, asegúrese de agregar un salto de línea para que los mensajes enviados por el microcontrolador aparezcan en nuevas líneas. En minicom, el salto de línea se activa / desactiva presionando Ctrl+a seguido de a. Una vez establecida la comunicación (conexión), es posible acceder al menú del microcontrolador enviando:
? (signo de interrogación seguido de un hit enter)
o
ayuda ("help" seguida de un golpe de entrada)
La salida será similar a la que se muestra en la siguiente figura:

Cada comando debe ir seguido de un retorno de carro - "\r" (presione enter) para que el microcontrolador pueda procesar la cadena enviada. Al presionar enter también se borra el búfer de entrada del microcontrolador, por lo que también se puede usar para ese propósito. Las palabras en los comandos están separadas solo por un carácter de espacio excepto para el comando “cfg deltaX[…] N[...]” donde las palabras / entradas están separadas por un carácter de tabulación “\t”. Si el comando enviado se recibe sucesivamente, el microcontrolador responderá al comando enviado devolviendo el comando de envío en letras mayúsculas. Si el comando se ejecuta sucesivamente, el microcontrolador responderá con un OK.
Los "[ ]" (corchetes) en los comandos definen el rango de valores de entrada aceptados. La representación numérica de estos límites indica el tipo de valor aceptado, es decir, entero o flotante. Si el valor límite contiene un caso decimal, los valores aceptados para ese parámetro son flotantes. Si el valor límite no contiene un caso decimal, los valores aceptados son solo números enteros. Vea los siguientes ejemplos:
cfg deltaX[5:25] N[10:1000] -> cfg 15 30 set maximum position %lf [40.0 60.0] (cm) -> set maximum position 47.7 set catch ball delay %d [1 2000] (ms) -> set catch ball delay 300 set pulley diameter %lf [1.0 4.0] (cm) -> set pulley diameter 2.356 set ID string %s [maximum length of 32 characters] -> set ID string WORLD_PENDULUM_LISBON cur -> cur go to origin speed[1.0:50.0] acceleration[1.0:150.0] -> go to origin 11.5 41.1 move forward deltaX[1:50.0] speed[1.0:50.0] acceleration[1.0:150.0] -> move forward 4.5 2.2 2.0
Antes de encender el microcontrolador, es importante realizar dos mediciones de posición (máxima y vertical). El procedimiento para medir estas posiciones se describe en Configuración de parámetros específicos para el experimento.
Descripción del menú de la consola (comandos/salidas)
Comandos relacionados con la máquina de estado y comunicación con el controlador e-lab (programa Java que se ejecuta en RaspberryPi):
- cur: Pregunta al microcontrolador sobre su configuración actual. El microcontrolador devolverá la siguiente línea:
- str: cambia el estado del microcontrolador a INICIADO e inicia un experimento si se configuró previamente usando un comando "cfg". Una vez que el experimento ha comenzado, el microcontrolador generará los datos en el siguiente formato: 1ra columna - número de punto de datos, 2da columna - período (s), 3ra columna - g (m/s²), 4ta columna - velocidad en la ubicación del láser (cm/s), quinta columna - temperatura ambiente (°C). Consulte la figura siguiente para obtener una ilustración:

- stp: Detiene un experimento y envía el microcontrolador al estado DETENIDO.
- rst: Reinicia el microcontrolador y lo envía al estado RESET.
- ids: Pídale al microcontrolador que envíe sus identificaciones. P.ej.: IDS WP_LIS STOPED
- cfg: Envía la configuración para un nuevo experimento. Este comando acepta dos parámetros enteros: 1° - desplazamiento inicial en cm, 2° - número de oscilaciones

Comandos para ejecutar funciones predefinidas, útiles para calibraciones y pruebas:
- stop ball: Este comando se utiliza para detener la oscilación de la bola. Después de detener la bola, la posición de reposo de la pala es en el fotodiodo / fotopuerta.
- prepare launch: Este comando acepta un entero que corresponde al desplazamiento inicial (amplitud máxima) antes de soltar la bola. El comando desplaza la pala a la posición requerida y descansa en esa posición.
- launch ball: Este comando soltaba la bola enviando la pala al origen a su máxima velocidad.
- test laser: Esta función se utiliza para probar simultáneamente el láser y la fotopuerta / fotodiodo. Una descripción más detallada de este comando se encuentra en Prueba de láser y fotopuerta, así como los procedimientos para verificar en caso de una prueba fallida.
- go to origin: Este comando acepta dos entradas: 1ª - velocidad en cm/s (doble) y 2ª - aceleración en cm/s² (doble). Envía la pala al origen (hasta que llega al microinterruptor).
- move forward: Este comando acepta tres entradas: 1ª - desplazamiento horizontal en cm (doble), 2ª - velocidad en cm/s (doble) y 3ª - aceleración en cm/s² (doble). Mueve la pala hacia adelante (alejándose del origen).
- move backward: Este comando acepta tres entradas: 1ª - desplazamiento horizontal en cm (doble), 2ª - velocidad en cm/s (doble) y 3ª - aceleración en cm/s² (doble). Mueve la pala hacia atrás (hacia el origen).
- move to photodiode: Este comando acepta dos entradas: 1ª - velocidad en cm/s (doble) y 2ª - aceleración en cm/s² (doble). Envía la pala al fotodiodo/fotopuerta si la pala está más allá del fotodiodo/fotopuerta en la dirección de avance. Si la pala está entre el fotodiodo y el origen el comando envía la pala al origen (hasta que llega al microinterruptor).
- light bulb on: Enciende la bombilla para iluminar el experimento.
- light bulb off: Apaga la bombilla.
- laser on: Enciende el láser.
- laser off: Apaga el láser.
- reboot: Realiza un reinicio de software en el microcontrolador. Antes de reiniciar, el microcontrolador almacena el número actual de oscilaciones en la memoria flash.
Comandos para configurar los parámetros específicos para el experimento (consulte la sección Configuración de parámetros específicos para el experimento para más detalles) y los almacena en la memoria flash para que no se pierdan en caso de una situación de apagado:
- set maximum position: Almacena la posición máxima absoluta permitida de la pala en cm (donde es mecánicamente imposible avanzar más en la dirección de avance).
- set sphere diameter: Almacena el diámetro de la esfera en cm y se mide en el plano ecuatorial.
- set pendulum length: Almacena la longitud del péndulo. Consulte Medición de la cuerda para obtener detalles sobre cómo medir la longitud de la cuerda. IMPORTANTE: la longitud del péndulo debe incluir el radio de la bola.
- set origin position: Almacena la posición de la pala cuando se encuentra en el origen, es decir, cuando la pala se detiene presionando el microinterruptor.
- set vertical position: Almacena la posición de la pala cuando el péndulo (bola+hilo) está perfectamente vertical.
- set photodiode position: Almacena la posición de la pala cuando se encuentra en la ubicación de la foto-doide/foto-puerta.
- set catch ball delay: Almacena el retardo utilizado para atrapar (detener) la pelota cuando ésta está oscilando con una amplitud relativamente grande. NOTA: Este parámetro ya no se usa en las versiones recientes de firmware porque el microcontrolador ahora puede atrapar la pelota automáticamente en función de su velocidad. Para que la bola de captura funcione bien, asegúrese de que la alineación de la bola se establezca como se especifica en los esquemas de Order of montaje y llenado con arena.
- set pulley diameter: Almacena el diámetro de la polea unida al motor paso a paso. Este valor se utiliza para calibrar el desplazamiento de la pala.
- set display intensity: Almacena la intensidad de la luz de la pantalla. Este valor debe establecerse de modo que los números sean visibles/legibles en la transmisión de video en vivo cuando el experimento esté en ejecución, es decir, cuando la bombilla esté encendida. 0 es la intensidad más baja y 15 es la máxima.
- set global oscillation counter: Almacena el número de oscilaciones globales totales. También se utiliza para anular/restablecer el contador.
- set ID string: Altera la cadena de identificación del experimento (nombre del experimento). La cadena está limitada a un máximo de 32 caracteres.
Valores / parámetros actuales para información:
- expected period: Muestra el período de oscilación esperado en segundos. Este valor se calcula con la longitud del péndulo y es fundamental para el correcto funcionamiento del aparato experimental.
- uptime: Muestra el tiempo en segundos desde que se encendió el microcontrolador.
- shovel is at origin: Indica si la pala está ubicada en el origen (sí/no).
- shovel is at photodiode: Indica si la pala está ubicada en el fotodiodo/fotopuerta (sí/no).
- laser is on: Indica si el láser está encendido (sí / no).
- photodiode is on: Indica si el fotodiodo/fotopuerta está encendido (estado de conducción) u oscuro (estado de no conducción). La salida es sí / no.
- temperature: Indica la temperatura en grados Celsius. El sensor de temperatura está ubicado en la caja DB25 conectada a la placa del microcontrolador.
- ERR 1: Indica que hay un problema con el láser o fotodiodo / fotopuerta. Consulte Prueba láser y fotopuerta para obtener más detalles y procedimientos de depuración.
- ERR 2: Indica que hay un problema con el microinterruptor. Consulte Conexiones para verificar que el microinterruptor esté conectado correctamente.
Prueba de láser y fotopuerta
El microcontrolador tiene una función dedicada (accesible desde el menú de la consola) para probar el láser y la puerta fotoeléctrica simultáneamente. Esta función consiste en hacer parpadear el láser 5 veces con un período completo de 100 ms (500ms en total). Si la puerta fotoeléctrica detecta correctamente el estado del láser, la prueba será satisfactoria. Para ejecutar manualmente la prueba del láser y la puerta fotoeléctrica, simplemente escriba el comando "probar láser" en la consola. Durante el arranque, el microcontrolador ejecuta la función de prueba del láser y de la puerta fotoeléctrica para garantizar que ambos componentes funcionen correctamente. Si la prueba falla, el microcontrolador devuelve el código de error "ERR1". Este error puede estar asociado con uno o más de los siguientes problemas posibles:
- Conexiones eléctricas incorrectas: Verifique la sección Conexiones para asegurarse de que tanto el láser como la puerta fotoeléctrica estén correctamente conectados al microcontrolador.
- Desalineación del láser y de la puerta fotoeléctrica: Compruebe si la luz láser apunta correctamente al orificio de la estructura de la puerta fotoeléctrica y ajuste como se describe en la sección Fotopuerta y alineación láser si es necesario.
- La fotopuerta está siempre cerrada (conductora): si la luz ambiental es demasiado intensa o si alguna fuente de luz distinta al láser atraviesa el orificio de la estructura de la fotopuerta con suficiente intensidad, puede suceder que la fotopuerta siempre está conduciendo, lo que hace imposible al microcontrolador distinguir entre los estados de encendido y apagado del láser. En este caso, la solución es reducir la luz ambiental o cambiar la orientación del experimento para que la fotopuerta reciba menos luz.

- Láser desenfocado: si el láser no está correctamente enfocado, es posible que la intensidad de la luz no sea suficiente para cerrar la puerta fotográfica. El láser se puede enfocar girando ligeramente su lente (hacia un lado o hacia el otro): gírelo hasta que el punto rojo sea lo más pequeño posible (por debajo de 1mm) a una distancia de ~ 150 mm. Para rotar la lente es necesario retirar el láser de su soporte. El láser se fija solo con presión y, en algunos casos, con una gota de pegamento o esmalte de uñas. IMPORTANTE: No desenrosque completamente la lente del cuerpo ya que dañará el láser.Nunca sujete la pieza láser A por la placa de circuito impreso pequeña.
Después de intentar corregir la posible fuente de errores, vuelva a ejecutar la prueba para verificar si el problema está resuelto.
Configuración de parámetros específicos para el experimento
Algunos de los parámetros configurables son esenciales para el funcionamiento correcto y seguro del lanzador y del experimento en general. Esta subsección describe cómo medir y configurar cada uno de los parámetros. Los siguientes parámetros configurables deben medirse con el microcontrolador apagado (apagado). Estos parámetros son:
- maximum position:La posición máxima de la pala se mide desplazando lentamente la pala con la mano hacia el final de la estructura deslizante (cuando el deslizador está completamente extendido). Una vez que la pala llega a la posición final (no puede moverse más) registre su posición absoluta leyendo el valor en la escala fijada en el lanzador con la ayuda del indicador adjunto a la pala.

- vertical position: Esta posición se obtiene cuando el péndulo (bola+cuerda) está en posición perfectamente vertical. Para eso, mueva lentamente la pala hacia atrás (hacia el origen o microinterruptor) hasta que haya pasado la posición de péndulo vertical. Espere a que la bola se detenga por completo. Una vez que la pelota esté completamente parada, acérquese a la pala en la dirección de la pelota hasta que toque la pelota pero sin desplazarla. Registre la posición absoluta de la pala leyendo el valor en la escala métrica fijada en el lanzador con la ayuda del indicador adjunto a la pala.

Una vez que se hayan medido los parámetros anteriores, encienda el microcontrolador encendiendo la Raspberry Pi. Durante el arranque, el microcontrolador realiza algunas pruebas iniciales. Deje transcurrir un tiempo hasta que finalicen esas pruebas antes de intentar enviar comandos al controlador. Mientras tanto, configure la conexión de la consola en serie para recibir mensajes del controlador. Una vez que el controlador envía su cadena de identificación o un código de error, el controlador terminó de arrancar y ahora podemos establecer los parámetros específicos para el experimento. Para eso, use los comandos descritos anteriormente. A continuación se muestra un ejemplo:
set maximum position 47.7
Si el comando se envió e interpretó correctamente, el microcontrolador debe responder de la siguiente manera:
Realice la misma para la posición vertical.
- sphere diameter: El diámetro de la esfera debe medirse en el plano ecuatorial de la bola donde el láser apunta a la bola. Si no se menciona o es imposible de medir, considere 8 cm, que deben estar lo suficientemente cerca de las esferas utilizadas habitualmente. Esta medición se utiliza principalmente para determinar la velocidad del péndulo en la ubicación del láser. Una vez que se ha medido el diámetro de la esfera, almacene el valor en el flash del microcontrolador usando el comando "set sphere diameter". Considere tener "múltiples lecturas ecuatoriales" en diferentes posiciones y tome su valor promedio porque la esfera probablemente sea un elipsoide.

- pendulum length: El procedimiento para medir la cadena se describe en Medida de cuerdas. Luego, el radio de la esfera/bola (en la dirección vertical, es decir, a lo largo de la dirección de la cuerda) debe agregarse a la longitud de la cuerda, lo que da como resultado la longitud del péndulo. La unidad de longitud para esta cantidad es el metro (a diferencia de las otras que es el centímetro). Una vez que se ha medido la longitud del péndulo, almacene el valor en el flash del microcontrolador usando el comando "set pendulum length".
- origin position: Esta es la ubicación de la pala cuando el microinterruptor la detiene (consulte la figura siguiente para ver una ilustración). Para medir esta posición:
- * envía la pala al origen usando el siguiente comando:
go to origin 2 2
- * una vez parada la pala, registre la posición absoluta de la pala leyendo el valor en la escala métrica fijada en el lanzador con la ayuda del indicador adjunto a la pala.
- * almacenar el valor medido (xx.xx) en la memoria flash del microcontrolador usando el comando "set origin position".