Difference between revisions of "Precision Pendulum Assembly"
| Line 14: | Line 14: | ||
The following drawings document the construction of the metallic pendulum's sections. | The following drawings document the construction of the metallic pendulum's sections. | ||
{| | {| | ||
| − | |+ World Pendulum standard manufacturing drawings | + | |+ World Pendulum standard manufacturing drawings |
|[[File:pendulo_mundial_vista.png|thumb]] | |[[File:pendulo_mundial_vista.png|thumb]] | ||
|[[File:pendulo_apoio.png|thumb]] | |[[File:pendulo_apoio.png|thumb]] | ||
|[[File:pendulo_topo.png|thumb]] | |[[File:pendulo_topo.png|thumb]] | ||
|} | |} | ||
| − | |||
{| | {| | ||
| − | |||
|[[File:pendulo_base.png|thumb]] | |[[File:pendulo_base.png|thumb]] | ||
|[[File:pendulo_fulcro.png|thumb]] | |[[File:pendulo_fulcro.png|thumb]] | ||
Revision as of 18:48, 11 December 2019
THIS PAGE IS STILL WORK IN PROGRESS
This page is intended to serve as the assembly instructions for the Precision Pendulum, particularly following the setup developed for the WPA project. This page starts with a brief description of the apparatus and its core components. Then it is followed by the description fo the assembly process which is divided into three core parts: the Mechanical assembly, the electronic controller assembly and the calibration of the setup. An additional step is described for those who want to allow "non-remote" operation (ie: local operation in a museum or common area with public access).
Contents
Apparatus Description
The pendulum apparatus is composed of three components: the supporting structure for the pendulum fulcrum, the launcher of the pendulum mass and the controller electronics.
The basic support can be a wall or a robust metallic structure like the one presented here. The choice for the mass was a training steel weight from the official shot put with 2kg. This weight has the advantage of having a drilled hole for holding an M4 screw and can be found in any good sports shop. This screw can be made of a threaded brass rod with 10mm length. A small 1mm hole is drilled on the rod were the pendulum string is soldered using current soldering thin-plumb(or any silver-thin alloy). The string used is from 0.4mm remanium wire that can be bought in any dentistry retailer. The other end is soldered to the same brass rod with a length of 50mm, using the same technique (1mm hole and soldering).
The following drawings document the construction of the metallic pendulum's sections.





The support for the fulcrum is made from any robust plane surface as for instance a brass or stainless steel piece with a 12-16mm hole. This surface has an indentation made with a diamond or hard steel blade which holds the pivot in place. With this design slippage is avoided.

The fulcrum itself is made as well of stainless steel or brass consisting in a triangular prism with 50mmx9mm with a central 1mm hole in one face crossing the opposite edge. In this hole is soldered an intravenous needle where the pendulum string is glued or soldered.



Mechanical assembly
There are two types of mechanical assemblies:
- Tripod independent metallic structure
- Wall fixed launcher and pendulum top holder
Parts (support structure)
Order of assembly and filling with sand
- Screw the three plastic base support under the triangular base
- Fit together the three lower sections of each leg following the numeration presented in the figure below
- Fix each one of the legs to the triangular base by tightening the provided screw and taking into account the letters "E" and "D", as shown in the figure below
- Fill the legs with sand while the whole structure is standing in the vertical (use a table or step ladder)
- Fit the last section of each leg following the numeration
- Fit the aluminum top plate and tighten it slightly to each one of the legs using the screws
- To check that both top plate and base triangle are aligned, one can lean the whole structure against a wall and adjust the top plate in accordance if necessary. Once both aligned, firmly tighten the screws of the top plate.

Electrical interfaces
This section describes the electrical components used to operate the experimental apparatus. As an overview, each launcher consists of:
- a Raspberry Pi (or computer running Linux): makes the interface between the micro-controller and the human (e.g., direct connection to a console) or e-lab server via Internet.
- a micro-controller (dsPic): makes the interface between the electrical components (including the step-motor) and the computer.
- electrical components: laser, micro-switch, photo-gate (or photo-diode), light bulb, temperature sensor, etc... see Parts for detailed description. These components make the interface between the experimental apparatus and the micro-controller while providing ways of controlling the pendulum as well as measurement capabilities.
See the Connections subsection for details on how to connect the electrical components.
The photo-gate/photo-diode and laser alignment is described in subsection Photo-gate and laser alignment. This is to be performed only after the micro-controller has been powered up, read section Interface console to micro-controller first.
Parts
This subsection presents a description of the different electrical parts of the experiment.
- Raspberry Pi (RPi): Device running Linux to allow remote connection to the experiment as well as an easy way to interface with the micro-controller. The present micro-controller and corresponding flat cable connections are designed for the Raspberry Pi 3 Model B, which has the following pin-out connections as described in https://www.raspberrypi.org/documentation/usage/gpio. If the Raspberry Pi is used to also power the micro-controller, a +5 V power supply with at least 2.5 A should be used.
- SD card: The SD card comes with Linux operating system and all necessary additional programs.
- micro-controller board: This board contains a micro-controller (dsPic33F) as well as all peripheral components needed for the control of the experiment. The board can be powered using the flat cable connected to the Raspberry Pi or by a USB connection (an onboard jumper is used to select the power source, the default position corresponds to the one from the flat cable).
- webcam: The webcam is used to provide live video streaming during the execution of the experiment. It is connected to the Raspberry Pi via an USB cable. The RPi performs the encoding and then sends it through Internet.
- light bulb: The light bulb consists of a 12 V LED bulb located above the launcher. This bulb turns on during the execution of the experiment to illuminate the pendulum and launcher (especially useful if the experiment is performed during the night).
- step-motor: The step-motor is part of the launcher and it is controlled by the micro-controller via a quad 1/2 H bridge driver. The step-motor is responsible by the displacement of the shovel.
- micro-switch: The micro-switch is located at the origin, close to the 0 cm of the metric scale on the launcher. It used to indicate the micro-controller that the shovel reached the origin and cannot go further in the backward direction (end of course).
- laser: The laser is located approximately at the center of the launcher. In conjunction with the photo-gate/photo-diode, the laser is used to measure the oscillation period as well as the location of the shovel.
- photo-gate (or photo-diode): The photo-gate is located in front of the laser. The ball travels in-between interrupting the light from the laser periodically.
- temperature sensor: A temperature sensor is located in the DB25 box to measure the ambient temperature. The ambient temperature influences the length of the pendulum. It is therefore important to monitor this quantity.
- display: The display shows the total accumulated number of oscillations. It consists of 8 digits, each one a 7 segments display.
- power supply: The step-motor requires a +12 V power supply capable of providing 2 A (maximum).
- start button: The start button allows to locally start an experiment with a predefined configuration (initial displacement of 10 cm during 20 oscillations).
Connections
Photo-gate and laser alignment
The photo-gate and laser alignment can only be performed once the micro-controller has been turned on and it is communicating with a console. See subsection Interface console to micro-controller on how to power on the micro-controller and how to control the laser. The alignment consists of pointing the laser into the hole of the photo-gate structure, as shown below in the figure on the left. The laser orientation can be adjusted using the 3 screws from its holding support structure, figure on the middle.
The procedure for the alignment consists of the following:
- Turn on the laser using the "laser on" command
- If necessary, adjust the laser orientation so that its light goes into the photo-gate structure hole (figure on the left). An example of misalignment is shown in the figure on the right.
- Perform the Laser and photo-gate test

|

|

|
Electric tests
- Test the micro-switch with the help of a multimeter (ohmmeter). When released it should present a very high impedance (order of MOhm) and when pressed it should present a very low impedance (like a shunt, ~0 Ohm). Perform the measurement at the DB25 pins: between pins no. 3 and 4.
- Check voltage of step-motor power supply to ensure that it is not higher than +12 V.
Calibration
String measurement

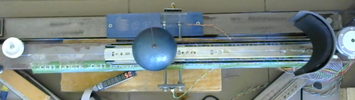
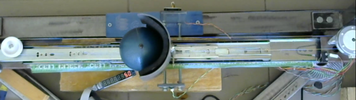
The pendulum accuracy depends strongly in its rigorous length measurement (~2,700 m) with less than 0,5 mm. Indeed this is the crucial factor to achieve the desired 0,02% accuracy and for that propose a well-calibrated measuring tape as to be chose. If this method is adopted special care has to be taken to avoid parallax. Alternative methods like ultrasonic measurement with laser targeting are the best, using a metallic or marble stone plane fitted tangential to the weight (allowing it to roll but touching the plane). With this method a few takes shall be done surrounding the ball and their average value will be considered the pendulum reference length.
Recalibration of the length as to be pursuit every month to guarantee a reasonable precision.
In the figure is shown how to correct the measuring tape initial offset by careful eliminating the systematic error from the contact with the sphere.
Plane of oscillation
Floor parallelism from top and bottom triangles
Bob movement given by fulcrum excitation
Interface console to micro-controller
The micro-controller provides a menu that allows the user to set the parameters of the experiment and run predefined functions to allow configuration and testing. The interface between user and micro-controller is performed via the RS-232 serial connection with the following parameters:
• Baud-rate: 115200 bps • Parity: No • Data bits: 8 • Stop bits: 1
As an example, the “minicom” console interface can be used to communicate with the micro-controller. In the RaspberryPi, this interface can be called from a shell using the following command:
minicom -D /dev/ttyS0
or
minicom -D /dev/ttyAMA0
The “/dev/ttyS0” or "/dev/ttyAMA0" is the device (micro-controller) location. The minicom program will create a serial connection with default parameter which, in principle, are the same as the ones mentioned above. If not, check the help page of the minicom program (type "man minicom") to see how to set those parameters. After launching the program, be sure to add a line feed so that the messages sent by the micro-controller appear in new lines. In minicom, the line feed is activated/deactivated by pressing Ctrl+a followed by a. Once the communication (connection) is established, it is possible to access the micro-controller menu by sending:
? (question mark followed by an enter hit)
or
help (“help” followed by an enter hit)
The output will be similar to the one shown in the following figure:

Every command should be followed by a carriage return – “\r” (hit enter) so that the micro-controller can process the sent string. Hitting enter also clears the micro-controller input buffer, so it can also be used for that purpose. The words in the commands are separated by one space character only except for the “cfg deltaX[…] N[...]” command where the words/inputs are separated by one tab character “\t”. If the sent command is successively received, the micro-controller will reply to the sent command by returning the send command in capital letters. If the command is successively executed the micro-controller will reply with an OK.
The “[ ]” (square brackets) in the commands define the range of accepted input values. The numeric representation of these limits indicate the type of accepted value, i.e., integer or float. If the limit value contains a decimal case, the accepted values for that parameter are float. If the limit value does not contain a decimal case, the accepted values are integer only. See the following examples:
cfg deltaX[5:25] N[10:1000] -> cfg 15 30 set maximum position %lf [40.0 60.0] (cm) -> set maximum position 47.7 set catch ball delay %d [1 2000] (ms) -> set catch ball delay 300 set pulley diameter %lf [1.0 4.0] (cm) -> set pulley diameter 2.356 set ID string %s [maximum length of 32 characters] -> set ID string WORLD_PENDULUM_LISBON cur -> cur go to origin speed[1.0:50.0] acceleration[1.0:150.0] -> go to origin 11.5 41.1 move forward deltaX[1:50.0] speed[1.0:50.0] acceleration[1.0:150.0] -> move forward 4.5 2.2 2.0
Before turning the micro-controller on, it is important to perform two position measurements (maximum and vertical). The procedure to measure these positions is described in Setting specific parameters for the experiment.
Commands related with the state machine and communication with e-lab driver (Java program running in the RaspberryPi):
- cur: Ask the micro-controller about its current configuration. The micro-controller will return the following line:
- str: Change the micro-controller state to STARTED and starts an experiment if previously configured using a "cfg" command. Once the experiment has started the micro-controller will output the data in the following format: 1st column - data point number, 2nd column - period (s), 3rd column - g (m/s²), 4th column - velocity at laser location (cm/s), 5th column - room temperature (degC). See the figure below for illustration:

- stp: Stops an experiment and send the micro-controller to the STOPED state.
- rst: Resets the micro-controller and send it to the RESET state.
- ids: Ask the micro-controller to send an its identifications. E.g.: IDS WP_LIS STOPED
- cfg: Send the configuration for a new experiment. This command accepts two integer parameters: 1st - initial displacement in cm, 2nd - number of oscillations

Commands to execute predefined functions, useful for calibrations and testing:
- stop ball: This command is used to stop the ball from oscillating. After stopping the ball, the shovel resting position is at the photo-diode/photo-gate.
- prepare launch: This command accepts one integer which corresponds to the initial displacement (maximum amplitude) before releasing the ball. The command displaces the shovel to the required position and rests at that position.
- launch ball: This command released the ball by sending the shovel to the origin at its maximum speed.
- test laser: This function is used to simultaneously test the laser and the photo-gate/photo-diode. A more detailed description of this command is found in Laser and photo-gate test as well as procedures to check in case of a failed test.
- go to origin: This command accepts two inputs: 1st - speed in cm/s (double) and 2nd - acceleration in cm/s² (double). It sends the shovel to the origin (until it reaches the micro-switch).
- move forward: This command accepts three inputs: 1st - horizontal displacement in cm (double), 2nd - speed in cm/s (double) and 3rd - acceleration in cm/s² (double). It moves the shovel in the forward direction (away from the origin).
- move backward: This command accepts three inputs: 1st - horizontal displacement in cm (double), 2nd - speed in cm/s (double) and 3rd - acceleration in cm/s² (double). It moves the shovel in the backward direction (towards the origin).
- move to photodiode: This command accepts two inputs: 1st - speed in cm/s (double) and 2nd - acceleration in cm/s² (double). It sends the shovel to the photo-diode/photo-gate if the shovel is beyond the photo-diode/photo-gate in the forward direction. If the shovel is between the photo-diode and the origin the command sends the shovel to the origin (until it reaches the micro-switch).
- light bulb on: Turns the light bulb on to illuminate the experiment.
- light bulb off: Turns the light bulb off.
- laser on: Turns the laser on.
- laser off: Turns the laser off.
- reboot: Performs a software reset to the micro-controller. Before resetting, the micro-controller stores the current number of oscillations into the flash memory.
Commands to set the specific parameters for the experiment (see section Setting specific parameters for the experiment for more details) and stores them in the flash memory so that they are not lost in case of a power down situation:
- set maximum position: Stores the shovel maximum absolute allowed position in cm (where it is mechanically impossible to go further in the forward direction).
- set sphere diameter: Stores the sphere diameter in cm and measured at the equatorial plane.
- set pendulum length: Stores the length of the pendulum. See String measurement for details on how to measure the string length. IMPORTANT: the pendulum length should include the radius of the ball.
- set origin position: Stores the position of the shovel when located at the origin, i.e., when the shovel is stopped by pressing the micro-switch.
- set vertical position: Stores the position of the shovel when the pendulum (ball + string) is perfectly vertical.
- set photodiode position: Stores the position of the shovel when located at the photo-doide/photo-gate location.
- set catch ball delay: Stores the delay used to catch (stop) the ball when this one is oscillating with a relatively large amplitude.
- set pulley diameter: Stores the diameter of the pulley attached to the step-motor. This value is used to calibrate the displacement of the shovel.
- set display intensity: Stores the display light intensity. This value should be set so that the numbers are visible/readable on the live video stream when the experiment is running, i.e., when the light bulb is on. 0 is the lowest intensity and 15 is the maximum one.
- set global oscillation counter: Stores the number of total global oscillations. It is also used to override/reset the counter.
- set ID string: Sores the experiment identification string (name of the experiment). The string is limited to a maximum of 32 characters.
Current values/parameters for information:
- expected period: Shows the expected oscillation period in seconds. This value is calculated with the pendulum length and it essential for the proper operation of the experimental apparatus.
- uptime: Shows the time in secdons since the micro-controller was powered up.
- shovel is at origin: Indicates if the shovel is located at the origin (yes/no).
- shovel is at photodiode: Indicates if the shovel is located at the photo-diode/photo-gate (yes/no).
- laser is on: Indicates if the laser is switched on (yes/no).
- photodiode is on: Indicates if the photo-diode/photo-gate is lit (conducting state) or dark (non-conduction state). The output is yes/no.
- temperature: Indicates the temperature in degrees Celsius. The temperature sensor is located in the DB25 box connected to the micro-controller board.
- ERR 1: Indicates that there is a problem with the laser or photo-diode/photo-gate. See Laser and photo-gate test for more details and debug procedures.
- ERR 2: Indicates that there is a problem with the micro-switch. See Connections to double-check that the micro-switch is properly connected.
Laser and photo-gate test
The micro-controller has a dedicated function (accessible from the console menu) to test the laser and photo-gate simultaneously. This function consist of blinking the laser 5 times with a full period of 100 ms (500 ms total). If the photo-gate correctly detects the laser state the test will be successful. To manually run the laser and photo-gate test, just type the “test laser” command in the console. During booting, the micro-controller runs the laser and photo-gate test function to ensure that both components are working properly. If the test fails, the micro-controller returns the “ERR1” error code. This error can be associated with one or more of the following possible problems:
- Wrong electrical connections: Check section Connections to ensure that both laser and photogate are properly connected to the micro-controller.
- Laser and photo-gate misalignment: Check if the laser light is properly pointed to the photo-gate structure hole and adjust as described in section Photo-gate and laser alignment if needed.
- The photo-gate is always closed (conducting): If the ambient light is too intense or if some source of light other than the laser is going through the photo-gate structure hole with enough intensity, it can happen that the photo-gate is always conducting making it impossible to the micro-controller to distinguish between laser ON and OFF states. In this case, the solution is to reduce the ambient light or change the experiment orientation so that the photo-gate receives less light.
After trying to correct the possible source of errors, re-run the test to check if the problem is solved.
Setting specific parameters for the experiment
Some of the settable parameters are essential for the correct and safe operation of the launcher and overall experiment. This subsection describes how to measure and set each one of the parameters. The following settable parameters need to be measured with the micro-controller turned off (powered off). These parameters are:
- maximum position: The shovel maximum position is measured by slowly displacing the shovel with the hand towards the end of the sliding structure (when the slider is fully extended). Once the shovel reaches the end position (cannot move further) record its absolute position by reading the value at the scale fixed on the launcher with the help of the indicator attached to the shovel.

- vertical position: This position is obtained when the pendulum (ball + string) is in the perfectly vertical position. For that, slowly move the shovel in the backwards direction (towards the origin or micro-switch) until it has passed the vertical pendulum position. Wait for the ball to stop totally. Once the ball is fully stopped, approach the shovel in the direction of the ball until it touches the ball but without displacing it. Record the absolute shovel position by reading the value on the metric scale fixed on the launcher with the help of the indicator attached to the shovel.

Once the above parameters have been measured, turn on the micro-controller by powering on the Raspberry Pi. During boot, the micro-controller performs some initial tests.
Allow some time until those tests are finished before trying to send commands to the controller.
In the meantime, set-up the serial console connection to receive messages from the controller.
Once the controller is sending its identification string or an error code, the controller finished to boot and we can now set the specific parameters for the experiment.
For that, use the commands described above. Here follows one example:
set maximum position 47.7
If the command was sent and interpreted successfully, the micro-controller should reply in the following way:
Perform the same for the vertical position.
- pendulum length: The procedure to measure the string is described in String measurement. Then, the radius of the sphere/ball (in the vertical direction, i.e., along the string direction) should be added to the string length, resulting in the pendulum length. The unit of length for this quantity is meter (unlike the other ones which is centimeter). Once the pendulum length has been measured, store the value in the micro-controller flash by using the command "set pendulum length".
- sphere diameter: The sphere diameter should be measured at the ball equatorial plane where the laser points on the ball. If not mentioned or impossible to measure, consider 8 cm, which should be close enough to the usually used spheres. This measurement is mainly used for the determination of the pendulum speed at the laser location. Once the sphere diameter has been measured, store the value in the micro-controller flash by using the command "set sphere diameter".

- origin position: This is the location of the shovel when it is stopped by the micro-switch (see figure below for illustration). To measure this position:
- send the shovel to the origin using the following command:
go to origin 2 2
- once the shovel is stopped, record the absolute shovel position by reading the value on the metric scale fixed on the launcher with the help of the indicator attached to the shovel.
- store the measured value (xx.xx) in the micro-controller flash memory using the command "set origin position".

- pulley diameter: The diameter of the pulley that is attached to the step-motor is used to calibrate the displacement of the shovel. A good initial guess can be obtained by measuring its diameter directly, as shown in the figure below. After storing this parameter in the micro-controller a more accurate calibration should be performed, described as the following:
- move the shovel to the origin by sending the command "go to origin 2 2"
- use the command "move forward" and request a displacement of 40 cm, e.g., "move forward 40 2 2" (speed of 2 cm/s is slow enough to guarantee a good calibration)
- check how much was the actual displacement: reached position - origin position
- if the displacement is different then the requested one (by more than 1 mm) scale linearly the pulley diameter to match the actual displacement with the requested one
- store the new "pulley diameter" in the micro-controller by using the command "set pulley diameter"
- resend the shovel back to the origin using the command "go to origin 2 2"
- use the command "move forward" and request a displacement of 40 cm. This time the reached position should corresponds to a displacement of 40 cm.


- photodiode position: The potodiode position corresponds to the location of the shovel when this one is stopped at the photo-diode/photo-gate, see the figure below for illustration. The procedure to obtain this position is the following:
- locate the shovel beyond (in the forward direction) the photo-gate and laser location. This can be achieved by using the command "move forward", as before.
- send the shovel to the photodiode using the command "move to photodiode", e.g., "move to photodiode 2 2" (to use a small speed of 2 cm/s)
- once the shove is stopped record the position on the metric scale and store it in the micro-controller using the command "set photodiode position"

After setting all parameters, double check if they were properly stored in the micro-controller by checking them on the menu by typing "?" or "help" on the console:

Local gravity (comparison with on-line calc tipo https://www.sensorsone.com/)
Non-remote usage
For local use, the gate system can drive an up/down counter. Currently, we have adopted the Velleman multifunction up/down counter kit K8035 avaiable off-the-shelf. The connection to the photo-diode is done via the VCC to the UP channel (pin 9) using just the first (R14) 2,2k resistor and eliminating the protection circuit in the transistor's gate (ZD1, R15 and R18).
The device should operate with Long debounce enable. Moreover we can use the regulated power supply (5V) in series with a 33 Ohms resistor to feed the photogate's laser pointing device.
Gate system

To avoid a long run of the experiment to achieve a reasonable period accuracy readout with a normal chronometer one could use instead of a gated photo-detector connected to an acquisition system or to a precision pulse counter.
The World Pendulum design can be easily adapted as it consists on a photodiode mounted in a aluminium (or PVC) holder (20x20x6 mm3) with a central 1,5mm hole and a 4mm cavity on the back side(see design) where is fixed the photodiode with a black plastic wax.
In front of the photodiode, a solid-state laser beam from a normal pointer device is used to trigger the counter once the ball hide the light.
Partners
Mechanical structures in suport of high schools replicas have been assembled and constructed with the kind help of CENFIM, Lisbon.
![]()